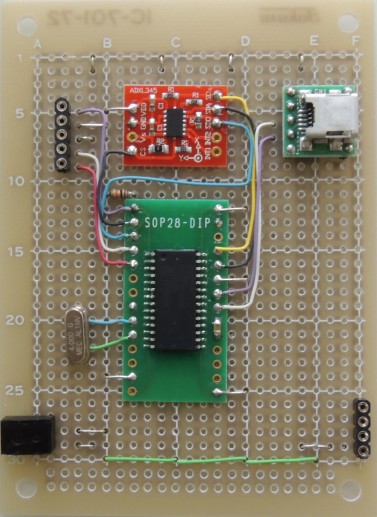
使用する回路は、PIC32MX230F064B (HARMONY)の章に書かれてあるもので、PICをPIC32MX270F256して、 これに加速度センサー(秋月電子通商:3軸加速度センサモジュール ADXL345)を追加しただけです。以下は、基板の写真です。
ICのピンADXL345(以下ADXLと書きます)のピンの接続は、以下の通りです。
PIC2番ピン(CS)-ADX(CS)
PIC3番ピン(SDI1)-ADXL(SDO)
PIC24番ピン(SDO1)-ADXL(SDA)
PIC25番ピン(SCK1)-ADXL(SCL)
ADXL(VDD)ー3.3V
ADXL(GND)ーGND
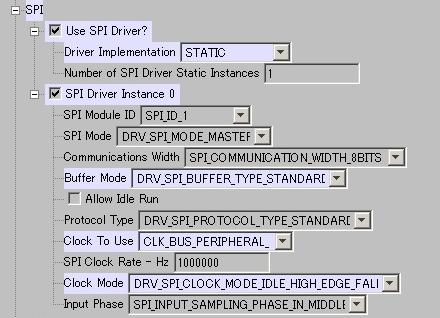
1.PICに書き込むファームウェアはMX270_gravity_cdc.zipです。このファームウェアは、microchip\harmony\v1_04_02\apps\usb\device\cdc_com_port_singleを手直しし、それに、加速度センサとデータを送受信するためのコード(SPI規格)を付け加えたものです(app.c)。MX270_gravity_cdc.zipを解凍して出てくるMX270_gravityフォルダーをmicrochip\harmony\v1_04_02\appsフォルダーの中に入れます。以下の図は、SPIの設定の様子です。
2.ファームウェアをPICに書き込み、実行します(PIC基板がCDC機器になります)。
3.PIC基板とPCをUSBケーブルで接続します。
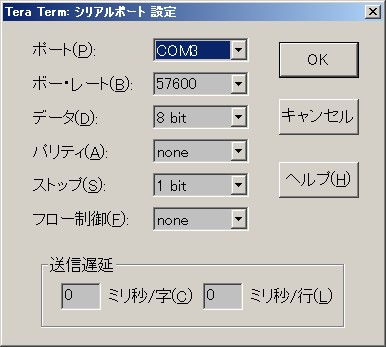
4.PC上でTera Termを起動して、メニューから”設定->シリアルポート”を選択すると、シリアルポート設定画面が以下の様に現れるので、ボーレートを57600 bps、データビットを8ビット、 パリティはなし, ストップビットを1、フロー・コントロールはなし、と設定してください。 設定が終わったら、シリアルポート設定画面を閉じ、メニューから”設定->設定の保存”を選択して、シリアルポート設定内容をファイルに保存しておくと、次回の接続時には、自動的に保存した設定内容が反映されます。
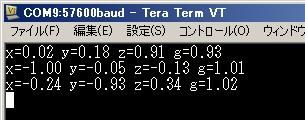
5.キーボードから適当なキーを押下すると、その度に、計測された加速度(静止状態では重力加速度[1に規格化されている])のx、y、z成分(±2gの範囲)とg=√(x*x+y*y+z*z)の値が以下の図の様に表示されていきます。なお、座標軸は加速度センサモジュール基板に書かれてありますが、各軸の正の方向が逆です。