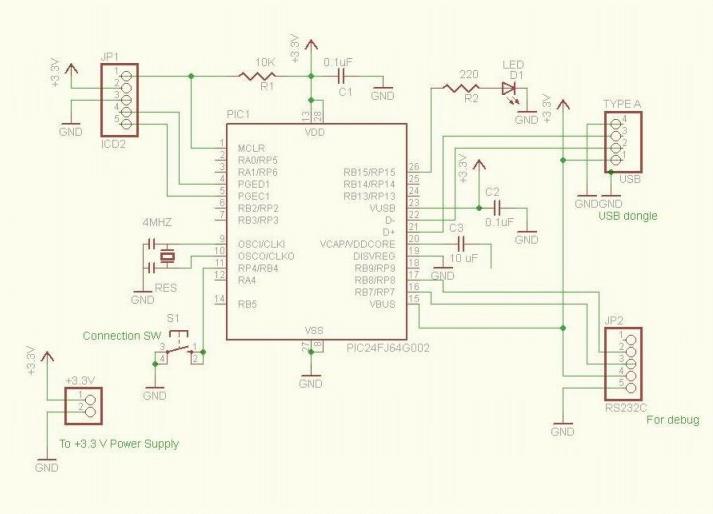
使用した回路は、Bluetoothで使用した以下の回路のどちらかを流用します。ただし、LED関連(D1とR2)とConnection SW(SW1)は使用しません。ところで、USBのTYPE Aコネクタの電源の正負には十分気負つけて配線します。最悪の場合、USBマウスやUSBキーボードを壊す可能性がありますので。USBマウス用のファームウェアはmouse_host.zipで、USBキーボード用のものはkeyboard_host.zipです。
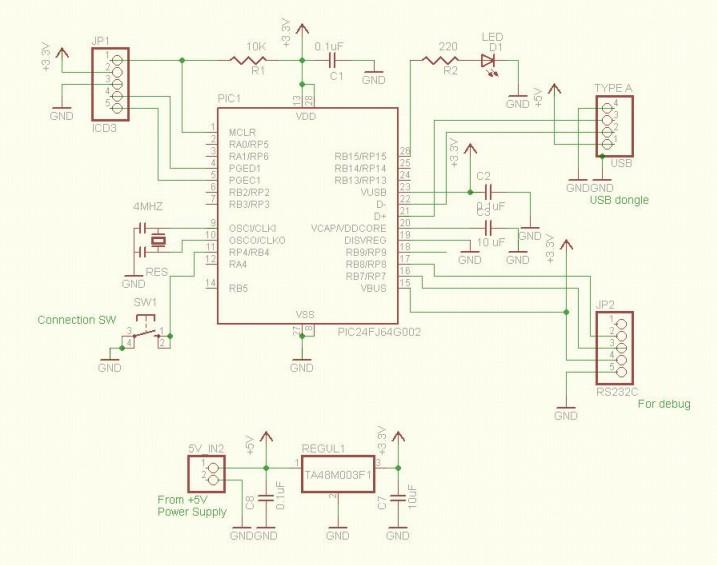
回路が正しく働いているかどうかをモニターします。もともとのマイクロチップ社のファームウェアでは液晶画面でモニターしているのですが、ここでは、パーソナル・コンピュータ(PC)でモニターすることにします。具体的にはTera Termというアプリケーション・ソフトウェア(ウェブで検索すると、すぐ入手できます)をPC上で起動して、これを用いてモニターすることにします。モニター回路はPIC16F1455 の章でのUSB シリアル変換器の回路を流用します。ただし、水晶発振子(XTAL)とコンデンサー(C3とC4)は必要ありません。
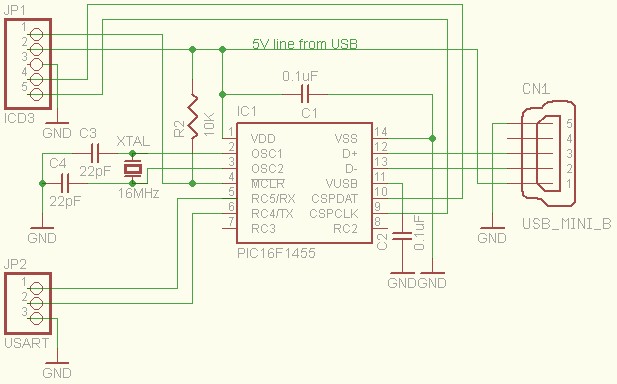
PIC16F1455用のファームウェアは、既存のプロジェクトの利用方法(MPLAB X)で紹介したcdc_serial.zipです。
1.PIC回路、モニター回路に必要なファームウェアを書き込みます。
2.PIC回路のピンヘッドJP2の2,3,5番ピンを、それぞれ、モニター回路のピンヘッドJP2の1,2,3番ピンに接続します。
3.PIC基板とPCをUSBケーブルで接続します。
4.デバイストライバーのある場所を聞かれますので、cdc_serialホルダーにあるinfフォルダーを指定してください。 なお、デバイスドライバーの組み込みに失敗するようでしたら、デバイスマネージャーから再組み込みをします。
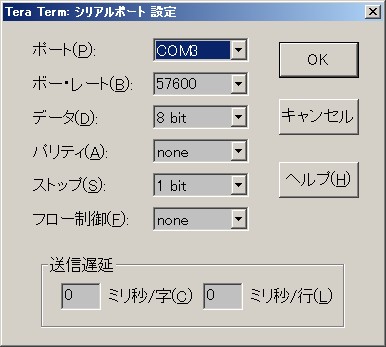
5.PC上でTera Termを起動して、メニューから”設定->シリアルポート”を選択すると、シリアルポート設定画面が以下の様に現れるので、ボーレートを57600 bps、データビットを8ビット、 パリティはなし, ストップビットを1、フロー・コントロールはなし、と設定してください。 設定が終わったら、シリアルポート設定画面を閉じ、メニューから”設定->設定の保存”を選択して、シリアルポート設定内容をファイルに保存しておくと、次回の接続時には、自動的に保存した設定内容が反映されます。
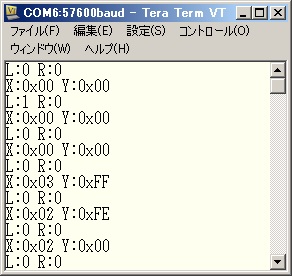
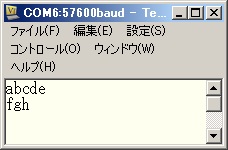
6.PIC回路のUSBのTYPE Aコネクタに、USBマウス(mouse_host.zipの場合)かキーボード(keyboard_host.zipの場合)のどちらかを接続します。USBマウスの場合、マウスを動かしたり、マウスボタンを押したりすると、その情報がTera Term画面上に現れます。